Nykyteollisuudessa korostuu tarve joustaville tuotantoratkaisuille. Tuotteiden sarjakoot ovat usein pieniä, rinnakkaisia tuotteita valmistetaan samanaikaisesti ja siirtymien uusiin tuotteisiin täytyy tapahtua nopeasti. Perinteisissä robottisoluissa tämä tarkoittaa usein tarttujan vaihtamista käsiteltävän tuotteen mukaan. Tarttujan vaihtaminen toiseen tai sen muokkaaminen jokaiselle tuotteelle erikseen voi olla ratkaisuna liian hidas tai kallis erityisesti pienille ja keskisuurille yrityksille.
Yksi haastava tuoteryhmä ovat teolliset leikkeet, jotka ovat suuremmasta levystä muotoon leikattuja tasomaisia kappaleita, joiden muodot, materiaalit ja koot vaihtelevat käyttötarkoituksen mukaan. Näiden automatisoitu poiminta vaatii tarttujalta erityistä mukautumiskykyä. Tämän vuoksi leikkeiden poimintaan kehitettiin uudenlainen tarttuja, joka kykenee käsittelemään vaihtelevia leikkeiden muotoja ilman tarttujan vaihtoa.
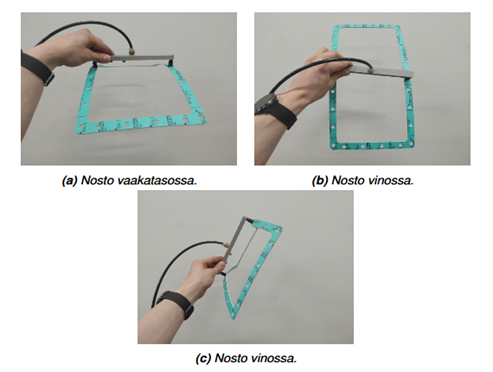
Tarttujan kehittäminen alkoi ideasta, jossa kahden imukupin välistä etäisyyttä voitaisiin säätää automaattisesti. Tällöin tarttuja voisi mukautua monenlaisiin leikemuotoihin siten, että nostokohdat sijoittuvat tasapainoisesti kappaleen painopisteen molemmin puolin. Kuvassa yläpuolella nähdään alustavia testejä tämän periaatteen testauksesta eri asennoissa, mikä osoitti ratkaisun olevan lupaava.
Tarttujan rakenne ja liikemekanismi
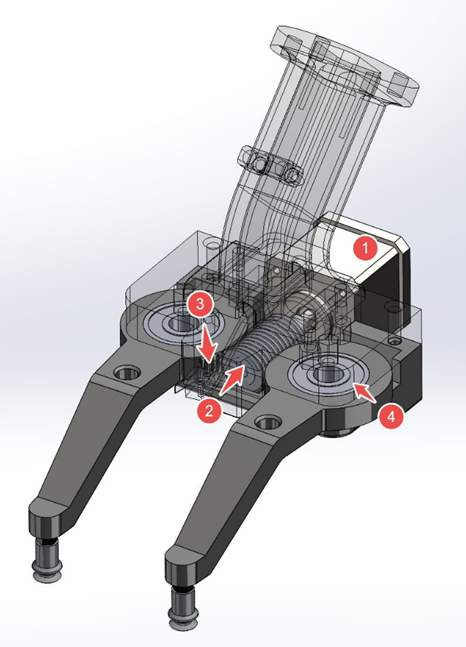
Kahden imukupin käyttö todettiin toimivaksi, ja sen pohjalta suunniteltiin kuvassa vasemmalla esitetty tarttujaratkaisu. Tarttujassa on kaksi kääntyvää vartta, joiden välistä kulmaa säädetään tarkasti kierukkavaihteen kaltaisen mekanismin avulla. Vartta säädettäessä imukuppien välinen etäisyys muuttuu, mikä mahdollistaa mukautumisen erikokoisiin leikkeisiin. Imukupeille johdetaan alipaine suoraan varsien sisällä kulkevien kanavien kautta.
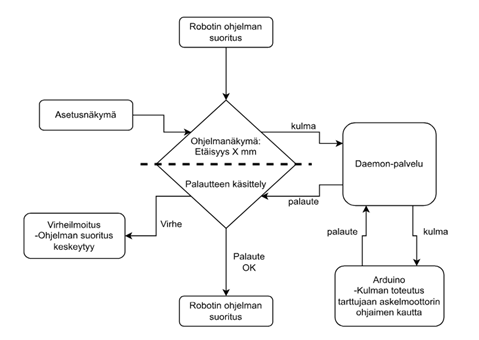
Tarttujan varsien kulma ja sitä kautta imukuppien välinen etäisyys on suoraan säädettävissä robotin ohjelmasta. Tarttuja on integroitu Universal Robots UR5 -robottiin URCaps-laajennuksen avulla, jolloin ohjaus toimii osana robotin graafista käyttöliittymää. Kuvassa oikealla esitetään järjestelmän toimintakaavio, joka havainnollistaa, kuinka tarttujan säätö toimii käytännössä. Robottiohjelma antaa komennon halutusta etäisyydestä, minkä jälkeen URCaps-laajennukseen toteutettu daemon-palvelu vastaanottaa tämän tiedon ja laskee tarvittavan kulman tarttujan varsille. Kulmatieto välitetään edelleen Arduino-mikrokontrollerille, joka ohjaa tarttujan askelmoottoria säätäen varsien asentoa. Prosessin aikana palautetta lähetetään takaisin robotille, jolloin mahdolliset näkyvät suoraan käsiohjaimen käyttöliittymässä.
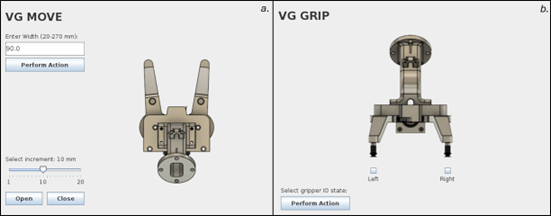
Osana TECHBOOST-projektia tarttujan URCaps-laajennusta kehitettiin edelleen, jotta kaikki tarvittavat toiminnot olivat helposti käytettävissä suoraan robotin käsiohjaimelta. Käyttöliittymässä on kaksi näkymää: VG Move, jonka avulla säädetään imukuppien välinen etäisyys halutulle arvolle (kuva 4a), sekä VG Grip, jossa ohjataan alipaineen kytkemistä tai katkaisemista sen mukaan, halutaanko kappale nostaa vai irrottaa (kuva 4b). Toiminnot voidaan aktivoida manuaalisesti käyttöliittymän painikkeista tai lisätä osaksi robotin ohjelmaa, jolloin komennot suoritetaan automaattisesti halutussa kohdassa ohjelman kulkua.
Tarttujan käyttöliittymään integroitiin lisäksi python-pohjainen konenäkömoduuli, joka hyödyntää leikkeleen DXF-leikkuutiedostoa muodon tunnistamiseen. DXF-tiedostosta saadaan kappaleen ääriviivat, joille lasketaan optimaaliset tartuntapisteet. Optimoinnin tavoitteena on, että imukupit pysyvät kappaleen sisällä ja tartunta on mahdollisimman tasapainoinen.
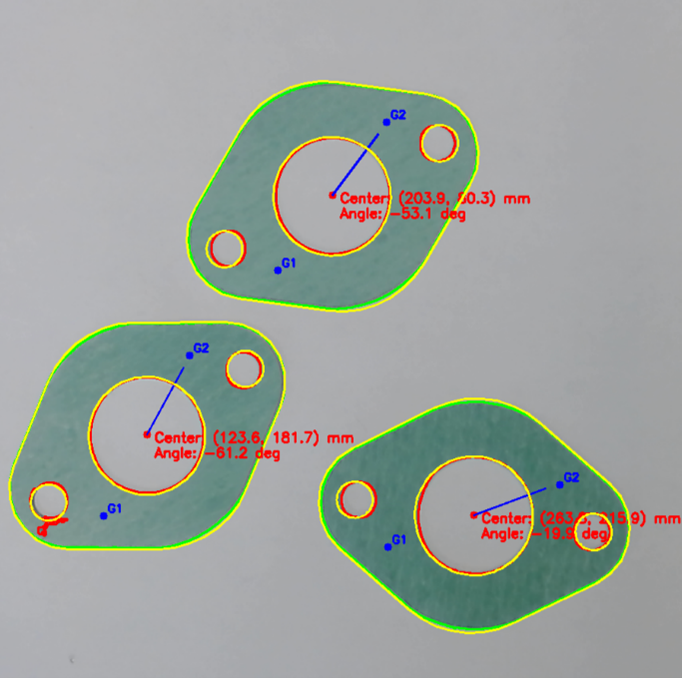
Tämän jälkeen konenäkö tunnistaa leikkeleen sijainnin ja asennon kamerakuvasta vertaamalla havaittuja muotoja DXF-malliin. Kun kappale tunnistetaan, sen sijainti-, kulma- ja imukuppien välistä etäisyyttä koskevat tiedot välitetään robotille URCaps-laajennuksen kautta. Kuvassa vasemmalla näkyy tilanne, jossa kolme samanlaista leikkelettä on tunnistettu kuvausalueelta. Jokaiselle kappaleelle on määritetty keskikohta, kiertokulma ja tartuntapisteet (G1, G2).
Tarttujan suunnittelu oli osa Yksittäiskappaleiden poiminta mukautuvalla robottitarttujalla -teknologiademoa.