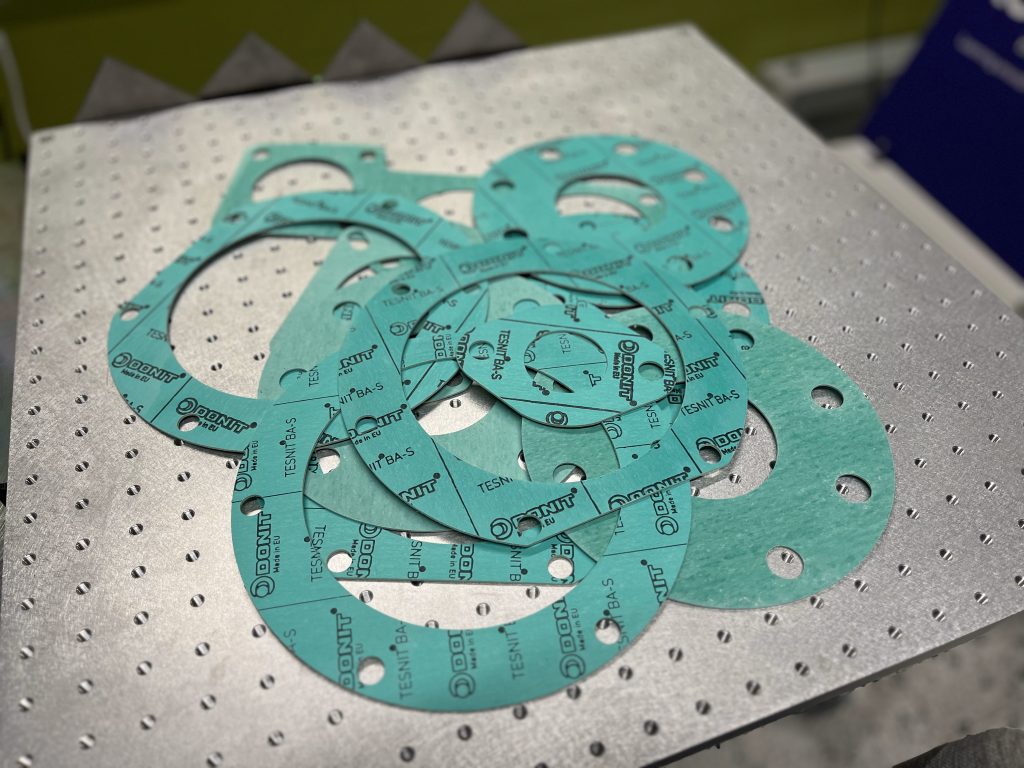
Projektissa tuettiin TT Gasketsia automaattisen kappaleenkäsittelyaseman kehittämisessä tiivisteiden käsittelyn tehostamiseksi. Asemassa robotti syöttää tiivisteet hiontakoneelle ja lajittelee valmiit tiivisteet hionnan jälkeen. Osana projektia kehitettiin mukautuva 2-sorminen imutarttuja, joka pystyy käsittelemään erimuotoisia tiivisteitä joustavasti. Automatisoinnin tavoitteena on vähentää riippuvuutta manuaalisesta työstä yksinkertaisissa syöttö- ja lajitteluprosesseissa.


Projektissa luotiin simulaatiomalli alustavien piirustusten ja vaatimusten pohjalta. Lisäksi imukuppitarttujan fyysinen prototyyppi rakennettiin, ja tarttujan sekä robotin välinen ohjaus testattiin käytännössä. Tampereen yliopisto tarjosi TT Gasketsille asiantuntemusta erityisesti simulaatioiden, yhteistyörobotiikan ja tarttujasuunnittelun osa-alueilla.
TT Gaskets
TT Gaskets tarjoaa räätälöityjä tiivisteratkaisuja eri teollisuudenaloille maailmanlaajuisesti. Tiivisteiden lisäksi yritys tarjoaa muun muassa seisokkiajan palveluita, tiivistekoulutusta ja tiivisteiden uudelleenvalmistusta.
Projektissa on kehitetty ohuiden ei-magneettisten leikkeiden käsittelyä cobotilla, joka on ollut kaupallisilla tarttujilla haastavaa. Uudella tarttujalla voidaan vähentää tuotannon toistuvia manuaalisia työvaiheita ja parantaa työn ergonomiaa sekä mielekkyyttä.
Jaakko Niukkala, Smart Product Specialist, Tampereen Tiivisteteollisuus Oy


Yksittäiskappaleiden poiminta mukautuvalla tarttujalla -TECHBOOST demovideo
Yksittäiskappaleiden poiminta mukautuvalla tarttujalla -Projektiraportti
Teknologiademon raporttina toimii Leevi Korhosen diplomityö, jonka voit lata alla olevasta linkistä.