Projekti keskittyy robotiikkaan perustuvien viemäristön korjaustyökalujen ja kuvauslaitteiden kehittämiseen. Tavoitteena on parantaa näiden laitteiden toimintaa, tehostaa viemäriputkien paikkauksia ja vähentää manuaalista työtä. Projektin tarkoituksena on nopeuttaa kunnossapitoprosesseja, parantaen viemäriverkoston luotettavuutta ja kestävyyttä.

Projektissa on tähän mennessä saavutettu merkittäviä edistysaskelia viemäristön kunnossapitotyökalujen kehittämisessä. Vetoyksikön suunnittelu on edennyt, ja moottoreiden sekä ohjainkorttien mitoitukset on tarkistettu. Myös paineilmalla toimivat tiivistyslaitteet ovat kehityksessä, ja niitä on parannettu tehokkuuden lisäämiseksi. Lisäksi kuvantamiseen käytettävä GoPro-kamera on hankittu, ja integrointia reaaliaikaiseksi kuvansiirroksi suunnitellaan. Komponenttihankinnat ovat osittain valmiit, ja kehitystyö jatkuu prototyyppien rakentamisen ja testaamisen parissa.
Sewerbot – Prototyyppi 1
Projekti ei keskittynyt vain rakenteellisiin ratkaisuihin, vaan kehitimme myös SewerBotin käyttöliittymän ja ohjausjärjestelmän. Ohjausjärjestelmänä hyödynnettiin tietokonetta ja Sewerbotin sisällä rakennettua sulautettua järjestelmää. Ohjaus oli mahdollista tietokoneen tai PS4 ohjaimen kautta. Tulevaisuudessa tavoittelemme kannettava ohjausyksikköä.

Olemme oppineet paljon viemäriolosuhteiden asettamista vaatimuksista ja haasteista. Tavoitteemme on saada toimiva SewerBot-prototyyppi valmiiksi syksyllä 2025, jolloin se pääsee tositoimiin oikeissa viemäri ympäristöissä.


Kuva 3 ja 4. Robo Garagessa pidetty syksyn 24 kauden viimeinen palaveri. Opiskelijat ja Underground City Oy henkilöstö. Kuvassa Undergroundcity Oy:n Jussi Kuikka, ohjaamassa Sewerbottia pöydällä PS4 Ohjaimella.
Keväällä 2025 projektitiimi Metropolian Robo-Garagesta jatkoi yhteistyötä Underground City Oy:n kanssa, keskittyen viemäriverkoston huoltoon ja kunnossapitoon kehitetyn Sewerbot-järjestelmän toiseen prototyyppiin.
Kenttäympäristön ymmärtäminen
Projektin alussa tiimi perehtyi perusteellisesti viemäriverkoston huoltoprosessiin paikan päällä. Erityisesti käyttäjänäkökulma – ”itse huoltotyöntekijän” rooli – nousi suunnittelussa keskiöön. Tämä loi pohjan käyttäjälähtöiselle laitesuunnittelulle.


Kuva 6 ja 7 Olemme tutustumassa viemäristössä tapahtuvaan paikkaus prosessiin, jossa käytetään kuvaus robotteja ja muuta oheisvarustusta viemäristön huoltoon ja ylläpitoa varten.


Kuva 8 ja 9 Tarkasteltiin kuvausbotin ja paikkaustyökalun laitteenjättöä viemärille ja prosessin kulkua.
Havainnot kentältä
Kenttähavainnot toivat esiin laitteen vaatimukset: kompakti rakenne, vähäinen komponenttimäärä ja helppo huollettavuus.
Sewerbot – Prototyyppi 2
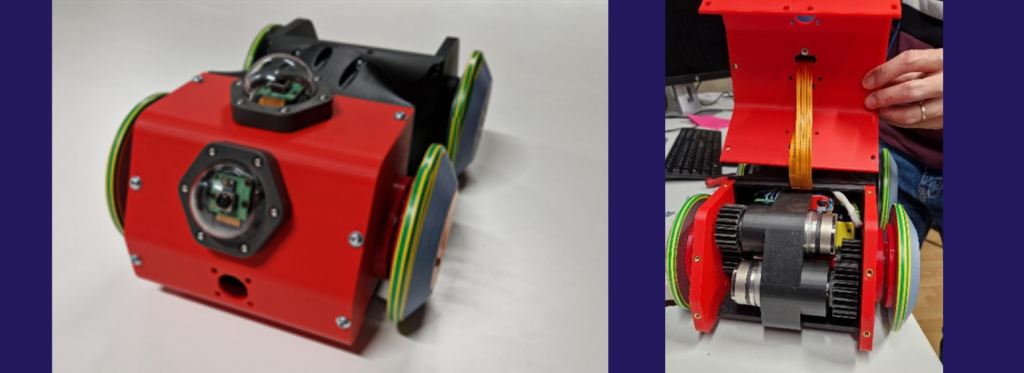
Sewerbotin toisen sukupolven prototyyppi suunniteltiin tiiviiksi ja osamäärältään yksinkertaiseksi, tavoitteena parempi huoltovarmuus. Rakenne koostuu kolmiosaisesta rungosta, johon on integroitu moottorit, ohjausyksiköt ja kamerajärjestelmät.
Prototyyppi valmistettiin 3D-tulostamalla, minkä ansiosta päästiin nopeasti testaamaan laitteen toiminnallisuutta simuloiduissa olosuhteissa.

Kuva 10 Sewerbot-Prototyyppi 2 digitaalinen malli.
Prototyyppi 2 – Suunnittelun uudet lähtökohdat
Kenttäkokemusten pohjalta hahmottui kolmiosainen runkorakenne:
· Sivukannet helpottavat huoltoa
· Keskirunko kantaa moottorit, ohjausjärjestelmän ja kamerat
· Tiivistettävät tasopinnat varmistavat vedenpitävyyden
Kamerat sijoitettiin niin, että ne voivat tarkastaa sekä putken pinnat että robotin kulkusuunnan. Tämä parantaa dokumentointia ja turvallisuutta.

Nopea valmistus – välittömät testit
Valmistimme prototyypin 3D-tulostuksella, mikä mahdollisti muutosten kokeilun heti ilman pitkiä odotusaikoja. Ensimmäiset testit tehtiin simuloiduissa olosuhteissa, joissa arvioitiin:
- Liikkumiskyky putken sisällä
- Kameran kuvakulmat ja valaistus
- Rungon kestävyys ja tiivistysratkaisut
Kohti kenttäpilotteja
Kun prototyyppi toimi laboratorio-olosuhteissa, siirryimme testiputkiin. Ensimmäinen hetki, kun Sewerbot liikkui vakaasti ja kuvasi putkien sisäpinnat vaatimusten mukaisesti, oli koko tiimille merkittävä.


Tulokset ja tulevaisuus
Prototyyppi 2 merkitsi suurta harppausta: parempi ohjattavuus, laadukkaampi kuva ja yksinkertaisempi huolto. Teknologian kypsyystasomme nousi TRL 4–5:een, ja syksyllä 2025 jatkamme yhteistyötä Underground City Oy:n kanssa kohti seuraavaa kehitysaskelta.

Tiimimme ROBO-Garagessa työskenteli käsi kädessä UGC:n kanssa, ja jatkuvan palautteen ansiosta kehitys eteni nopeammin kuin olimme ennustaneet. Tämä matka jatkuu – ja jokainen askel vie meitä lähemmäs Sewerbotin valmista kenttätyökalua.

Tässä on lopullinen demo:
Underground City Oy
Underground City kehittää robotiikkaan perustuvia ratkaisuja vedenpuhdistuksen ja viemäristön kunnossapidon tehostamiseksi.