
Inaro Oy:n muurausrobottiprojekti teki merkittäviä edistysaskelia syksyllä 2024. Kehitimme OnRobot tarttujan ominaisuuksia, joka edisti ABB-GoFan käsittelykykyjä erikokoisissa ja -muotoisia tiileissä, sekä tarkensimme tiilien ladonnan sekä niiden position paikannusta konenäkö kameraa hyödyntämällä.

Muurausprosessissa laastin ominaisuudet ja sen pursottaminen ovat avainasemassa. Ensimmäisissä prototyypeissä perinteinen rakeinen laasti osoittautui ongelmalliseksi, ja kokeilut osoittivat tarpeen kehittää laastin syöttö menetelmää sekä itse pursotinta, joka soveltuisi paremmin robottisolun käyttöön. Tavoitteena seuraavalle kaudelle on suunnitella laastirakenne, joka kiinnittyy tiileen paremmin.

Muuraamisen käynnistäminen – käyttöjärjestelmän kehittäminen
Miten muurarista tehdään koodari?
Inaro-keississä kehitetään tiilimuurausta automatisoivaa robottikonseptia. Vuonna 2025 aikana työn fokuksessa oli kaksi asiaa:
- laastinsyötön toteuttaminen uudella tavalla
- muurausrobotin käyttöliittymän ja käyttöjärjestelmän kehittäminen.
Työn tuloksena syntyi sekä uusi laastinsyöttökonsepti että ABB-robottiin räätälöity muurauskäyttöliittymä.
Uusi laastinsyöttöratkaisu tiilimuurausrobotille
Laastinsyöttömenetelmää lähdettiin kehittämään uudella tavalla, koska kiinteä laastinsyöttöpiste pidentää muurausaikaa ja lisää robotin turhia liikkeitä. Tämä hidastaa tiilien ladontaa ja heikentää prosessin tehokkuutta.
Kiinteällä laastinsyöttölaitteistolla varmistettiin ensin laastin sopivuus. Laastiksi valittiin Weber OL 15 -ohutsaumalaasti. Laasti sekoitetaan ja annetaan tasaantua noin 10 minuuttia ennen käyttöä. Tämän jälkeen se säilyy muurauskelpoisena noin 3 tunnin ajan. Laasti johdetaan pumpulta letkua pitkin robotin tarttujalle.
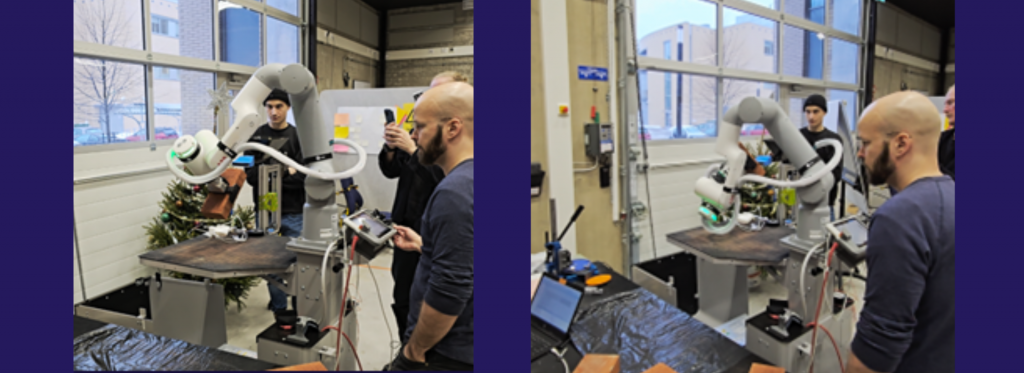
Muurausohjelmassa pumpun käyttö on ohjelmoitu signaaliohjauksella. Pumpun käynnistyspainikkeen ohjaus otettiin Gofa-robotin ohitusliitännästä: kun signaali aktivoituu, se antaa herätteen käynnistyspainikkeen virtapiiriin ja pumppu käynnistyy.
Pumppuun lisättiin letkuadapteri, jotta ohuempi laastiletku voitiin kiinnittää. Gofaan rakennettiin integroitu, laastia syöttävä tarttuja, jonka kylkeen 3D-tulostettiin laastinlevityskanavat. Näiden kanavien kautta robotti levittää laastin tiilien pinnoille.

Pumpun syöttönopeus ja robotin liikenopeus vaikuttavat laastin määrään. Jos laastia syötetään enemmän, robotin on liikuttava nopeammin, jotta saumapaksuus pysyy haluttuna. Ohutsaumamuurauksessa laastisauman paksuudeksi tavoitellaan noin 3 millimetriä. Viiden tiilen seinän muuraamiseen Gofa-robotilta kuluu tällä ratkaisulla 2 minuuttia ja 17 sekuntia

Räätälöity käyttöjärjestelmä muurausrobotille
Muurauskonseptin kehityksessä käyttökokemus on keskeinen: jotta robotti voidaan viedä työmaaympäristöön, sen ohjauksen on oltava selkeä, turvallinen ja helposti opittava.
ABB:n uudistunut AppStudio mahdollisti muurausrobotille räätälöidyn käyttöjärjestelmän rakentamisen. Robotille kehitettiin RobotStudio-ympäristöön muuraamiseen suunniteltu käyttöliittymä, jossa käyttäjä voi syöttää keskeiset muurausparametrit.

Muurauksessa keskeisiä parametreja ovat esimerkiksi:
- tiilen mitat ja paino
- haluttu saumaväli
- muurausnopeus
- tiilen orientaatio (esim. ponttisuunnat tai erityiset asennusasennot).
Nämä parametrit syötetään robotille, jotta se “ymmärtää”, millaista tiilimuuria on tarkoitus rakentaa. Parametrien avulla robotti pystyy myös tunnistamaan vikatilanteita, kuten häiriöt tiilien tai laastin syötössä.
Tiilen orientaation säätäminen on hyödyllistä erityisesti tilanteissa, joissa tiili täytyy asettaa tiettyyn suuntaan – esimerkiksi pontattujen tiilien kohdalla.

Konfiguraattorin avulla käyttäjä voi syöttää eri tiilimallien tarkat mitat ja tarvittavat asentoparametrit. Järjestelmä laskee näiden perusteella oikeat tartunta- ja asetteluliikkeet, jolloin robotti osaa käsitellä erilaisia tiilirakenteita ilman erillistä uudelleenohjelmointia.

Käyttöjärjestelmä kokoaa yhteen kaikki muurausprosessin vaiheet: tiilitiedot, laastinsyötön, muurauslinjan asetukset ja robotin turvatoiminnot. Selkeä käyttöliittymä mahdollistaa sen, että myös työmaahenkilöstö voi ohjata robottia ilman syvää ABB-ohjelmointiosaamista.
Tässä on lopullinen demo:
Inaro Oy
Inaro Oy on kestävään kaupunkisuunnitteluun ja rakennusarkkitehtuuriin erikoistunut toimisto, painottaen ekologista suunnittelua ja teknologian hyödyntämistä.