Oinride Oy aims to apply space technology and mobile robotics to the mining industry to improve efficiency and safety. The mobile robot designed for mining operations must be able to navigate uneven terrain, where visibility may be poor in certain areas. The robot is a so-called Rocker-Bogie Mars Rover— a robust mobile device based on technology developed by NASA, ready to operate even on the surface of Mars.
The goal is to create better, environment-adapted wheels for the device and to develop a Unity-based simulation that helps visualize the robot’s surroundings and to build a simulation model of the device.
Technologies: Mobile robotics, LiDAR, remote control
Project Results
A Unity simulation has been developed in the project, featuring an interface with ROS2, allowing robot-generated data to be imported into Unity and creating a 3D map of the environment. Previously created environments can be used for simulation. The simulation is robot-agnostic, meaning any robot and any scanned or simulated environment can be brought into it. This project expands the opportunities of Metropolia and Oinride Oy to develop Digital Twin technology, reinforcement learning training, and simulations.
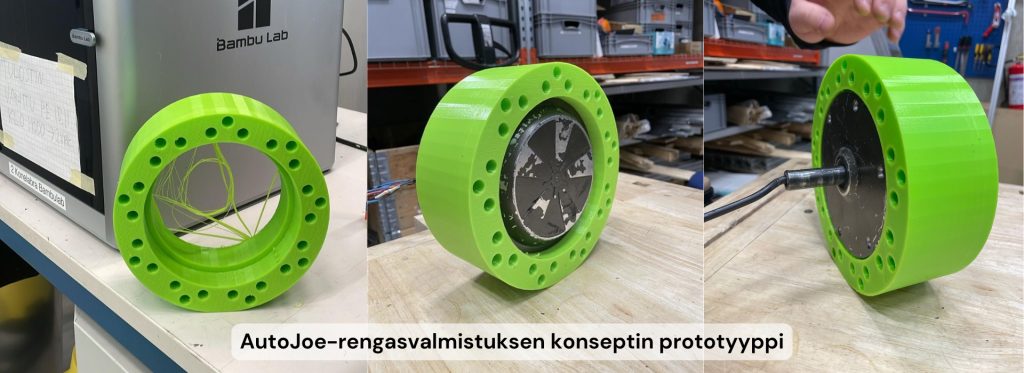
The first prototypes of the wheels—both PU and 3D-printed—are ready and further development is ongoing.

Oinride Oy
Oinride Oy develops remotely operated mobile robotics for demanding environments. The solutions enhance driver safety, productivity, and cost-efficiency.