This project aims to develop a robot for bricklaying as part of the TECHBOOST initiative. The goal is to automate brick construction and reduce costs by utilizing domestic bricks and robotics. The project combines the expertise of Inaro Oy and Metropolia, and seeks to effectively integrate robotics to construction site conditions, focusing in particular on the positioning of bricks and the handling of mortar.
Technologies: Robotics, machine vision, automation, BIM, CAD
Inaro Oy’s bricklaying robot project made significant progress in autumn 2024. We improved the capabilities of the OnRobot gripper, which enhanced the ABB-GoFa’s handling of bricks of various sizes and shapes, and we increased the accuracy of brick placement and position detection by utilizing a machine vision camera.
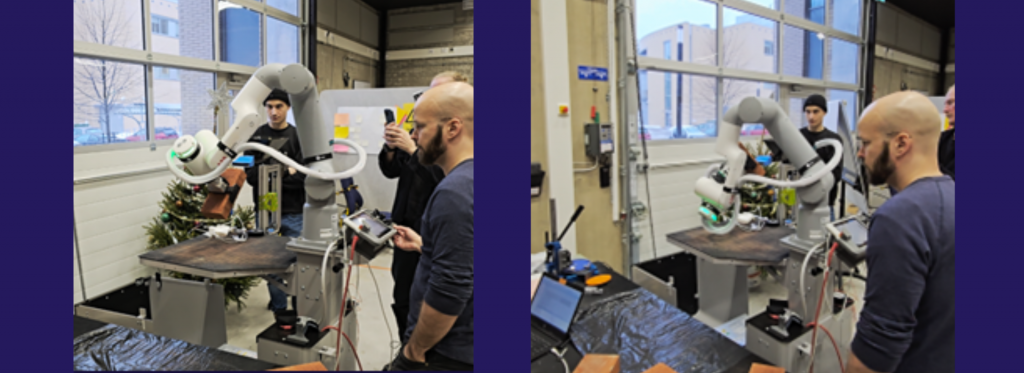

In the bricklaying process, the properties of the mortar and its extrusion are crucial. In the first prototypes, traditional granular mortar proved problematic, and tests showed the need to develop both the mortar feeding method and the extruder itself to better suit the robot cell. The goal for the next phase is to design a mortar composition that adheres to the brick better.

Initiating Bricklaying – Developing the Operating System
How does a bricklayer become a coder?
In the Inaro case, a robotic concept for automating bricklaying is being developed. In 2025, the focus of the work was on two key aspects:
- Implementing a new approach to mortar feeding
- Developing the user interface and operating system for the bricklaying robot
The outcome of this work was both a new mortar feeding concept and a bricklaying user interface tailored for the ABB robot.
New Mortar Feeding Solution for the Bricklaying Robot
The approach to mortar feeding was reimagined, as a fixed mortar feeding point increases laying time and leads to unnecessary robot movements. This slows down brick placement and reduces process efficiency.
First, a fixed mortar feeding device was used to ensure mortar suitability. The chosen mortar was Weber OL 15 thin-bed mortar. The mortar is mixed and allowed to settle for about 10 minutes before use, after which it remains workable for about 3 hours. The mortar is supplied from a pump through a hose to the robot gripper.
In the bricklaying program, the pump’s operation is controlled by a signal. The start button control for the pump was connected to the GoFa robot’s bypass port: when the signal activates, it triggers the power circuit of the start button, and the pump starts.
A hose adapter was added to the pump so that a thinner mortar hose could be attached. An integrated mortar-feeding gripper was built for the GoFa, with 3D-printed mortar spreading channels on its side. Through these channels, the robot spreads mortar on the surfaces of the bricks.

The pump feed rate and the robot’s movement speed determine the amount of mortar applied. If more mortar is fed, the robot must move faster to maintain the desired joint thickness. For thin-bed joints, the target joint thickness is about 3 millimeters. Using this solution, the GoFa robot takes 2 minutes and 17 seconds to build a wall with five bricks.

Custom Operating System for the Bricklaying Robot
User experience is central in the development of the bricklaying concept: to use the robot at a construction site, its control must be clear, safe, and easy to learn.
ABB’s renewed AppStudio made it possible to build a custom operating system for the bricklaying robot. A user interface tailored for bricklaying was developed in the RobotStudio environment, where the user can input key bricklaying parameters.

Key parameters in bricklaying include for example:
- brick dimensions and weight
- desired joint spacing
- bricklaying speed
- brick orientation (e.g., tongue/groove directions or special installation positions)
These parameters are fed to the robot so it can “understand” the type of brick wall intended. Through these parameters, the robot can also detect faults, such as issues with brick or mortar feeding.
Adjusting brick orientation is particularly useful in situations where a brick must be placed in a specific direction – for example, with interlocking (tongued/grooved) bricks.

Through the configurator, the user can input the exact dimensions and necessary position parameters for different brick models. The system then calculates the appropriate gripping and placement movements, allowing the robot to handle various brick constructions without the need for separate reprogramming.

The operating system unites all stages of the bricklaying process: brick information, mortar feeding, bricklaying line settings, and robot safety functions. A clear user interface makes it possible for construction site personnel to control the robot without deep ABB programming expertise.
Here is the final demo:
Inaro Oy
Inaro Oy is a firm specialized in sustainable urban planning and architectural design, emphasizing ecological design and the use of technology.